-
1 bit slot
время передачи одного бита
битовый интервал
такт передачи
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > bit slot
-
2 bit slot
время передачи одного бита; битовый интервал; такт передачи -
3 bit slot
время передачи одного бита, битовый интервалEnglish-Russian dictionary of computer science and programming > bit slot
-
4 bit slot
время передачи одного бита, битовый интервалсм. тж. bit intervalАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > bit slot
-
5 bit time
1) Компьютерная техника: такт передачи2) Вычислительная техника: битовый интервал, время ( прохождения) бита, время передачи бита, время прохождения бита, интервал передачи бита -
6 bit slot
1) Компьютерная техника: такт передачи2) Вычислительная техника: битовый интервал, время передачи бита, время передачи одного бита -
7 Bit-Zeit
-
8 bit interval
отрезок времени, в течение которого двоичный разряд находится в состоянии 1 ("включено"), или время передачи одного бита.Syn:Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > bit interval
-
9 bit time
битовое время
Длительность одного бита.
[ http://can-cia.com/fileadmin/cia/pdfs/CANdictionary-v2_ru.pdf]Тематики
EN
время передачи бита
такт передачи
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > bit time
-
10 Modbus RTU protocol
протокол Modbus RTU
-
[Интент]3.5.1. Протокол MODBUS
Протокол Modbus был предложен в 1979 году компанией Modicon. Он должен был служить протоколом реализации внутренних коммуникаций «точка-точка» между ПЛК Modicon и панелью программирования, предназначенной для ввода программ в этот ПЛК. Протокол Modbus построен по принципу открытой системы.
Область применения этого протокола не ограничивается только промышленной автоматизацией, Modbus применяется во многих других областях, включая системы автоматизации зданий.
Протокол Modbus предназначен для использования в сетевых структурах нескольких разновидностей, в том числе в разработанной компанией Modicon одноранговой сети Modbus Plus.
Modbus представляет собой протокол, построенный по принципу master-slave (ведущий-ведомый). Modbus допускает наличие в структуре только одного ведущего устройства и от 1 до 247 ведомых. В качестве ведомого устройства обычно выступает ПЛК. Роль ведущего устройства обычно играет либо панель программирования, либо главный компьютер.
Идеология протокола такова, что ведущему устройству адрес не присваивается, а ведомые пронумерованы от 1 до 247.
Адрес «0» зарезервирован в качестве адреса широковещательной передачи сообщений, предназначенных всем ведомым устройствам. Такое сообщение получают все ведомые устройства, но ответ на него не предусмотрен.
Сообщения-команды, исходящие от ведущего устройства, именуются запросами, а ответные сообщения, присылаемые ведомым устройством, ответами. Упрощенная структура формата сообщения, как запроса, так и ответа, показана ниже:
Адрес устройства Код функции Данные Контрольная сумма
Ведущее устройство не имеет адреса вообще, поэтому в поле адреса всегда указывается номер ведомого устройства. Если это запрос, то он направляется ведомому устройству с указанным адресом. Если сообщение является ответом, то оно поступает от ведомого устройства с проставленным в этом поле его адресом. Сообщение-запрос всегда содержит тот или иной код функции, например, код 03 – это функция «Чтение регистров хранения».
В последнем поле каждого сообщения помещается код ошибки, формируемый устройством-отправителем, так что устройство-получатель может проверить целостность пришедшего сообщения.
Протокол Modbus рассчитан на два режима последовательной передачи данных. Один именуется ASCII (American Standard Code for Information Interchange), а второй – режимом RTU (Remote Terminal Unit). Термин RTU ведет происхождение от SCADA-систем (Supervisor Control and Data Acquisition), в которых ведущее устройство, именуемое CTU (Central Terminal Unit), обменивается информацией с несколькими удаленными устройствами (RTU), находящимися от него на определенных расстояниях.
Для каждого режима определена структура кадров сообщений и их синхронизация. В процессе передачи по каналам последовательной связи оба режима предусматривают асинхронную передачу, при которой имеется заранее определенная структура кадра и символы пересылаются последовательно – по одному в каждый момент.
В табл. 3.11 и 3.12 показана отправка символа при использовании асинхронной последовательной передачи данных для обоих режимов с битом четности или без него.
Таблица 3.11. Структура кадра для 7-битового режима ASCII
Стартовый бит Бит четности Стоповый бит
Стартовый бит Стоповый бит Стоповый бит
Таблица 3.12. Структура кадра для 8-битового режима RTU
Стартовый бит Бит четности Стоповый бит
Стартовый бит Стоповый бит Стоповый бит
Каждый символ передается как последовательность битов, причем время, затрачиваемое на передачу одного бита, обратно пропорционально скорости передачи данных. Например, при скорости 9600 бод время передачи 1 бита равно 104,1 мкс. Когда информация не передается, линии связи находится в маркерном (marking) состоянии. Противоположное ему состояние именуется заполненным (spacing). Когда линия переходит в заполненное состояние для побитовой передачи данных, каждому символу предшествует стартовый бит, а в конце идет один стоповый бит или больше, после этого линия возвращается в маркерное состояние.
В промежутке между стартовым и стоповым битами осуществляется передача 7, в режиме ASCII, или 8, в режиме RTU, битов, составляющих символ, причем первым посылается младший бит (LSB). После символа идет либо бит четности, либо еще один стоповый бит. При этом пользователь имеет возможность выбирать один из трех вариантов: контроль на четность, или на нечетность, либо отсутствие контроля. В режиме ASCII передача одного символа требует передачи 10 битов, а в режиме RTU – 11. При асинхронной связи символы могут пересылаться либо вплотную, либо с временным интервалом между ними. Последовательности символов, образующих сообщения, имеют различные структуры в зависимости от режима – ASCII или RTU.[ Источник]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > Modbus RTU protocol
-
11 bit duration
время, необходимое для передачи одного бита.Syn:Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > bit duration
-
12 Bit-Zeit
fвремя передачи или обработки ( одного) двоичного разряда или бита -
13 clock synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
синхронизация по тактам
тактовая синхронизация
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > clock synchronization
-
14 time synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Англо-русский словарь нормативно-технической терминологии > time synchronization
-
15 RS-485
интерфейс RS-485
Промышленный стандарт для полудуплексной передачи данных. Позволяет объединять в сеть протяженностью 1200 м до 32 абонентов.
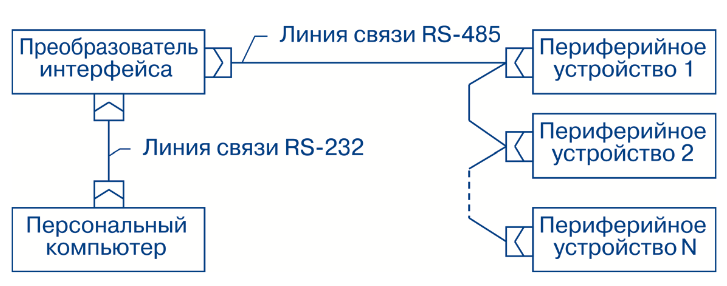
[ http://www.morepc.ru/dict/]Интерфейс RS-485 - широко распространенный высокоскоростной и помехоустойчивый промышленный последовательный интерфейс передачи данных. Практически все современные компьютеры в промышленном исполнении, большинство интеллектуальных датчиков и исполнительных устройств, программируемые логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в своем составе ту или иную реализацию интерфейса RS-485.
Интерфейс RS-485 основан на стандарте EIA RS-422/RS-485.
К сожалению, полноценного эквивалентного российского стандарта не существует, поэтому в данном разделе предлагаются некоторые рекомендации по применению интерфейса RS-485.
Традиционный интерфейс RS-232 в промышленной автоматизации применяется достаточно редко. Сигналы этого интерфейса передаются перепадами напряжения величиной (3...15) В, поэтому длина линии связи RS-232, как правило, ограничена расстоянием в несколько метров из-за низкой помехоустойчивости. Интерфейс RS-232 имеется в каждом PC–совместимом компьютере, где используется в основном для подключения манипулятора типа “мышь”, модема, и реже – для передачи данных на небольшое расстояние из одного компьютера в другой. Передача производится последовательно, пословно, каждое слово длиной (5...8) бит предваряют стартовым битом
и заканчивают необязательным битом четности и стоп-битами.
Интерфейс RS-232 принципиально не позволяет создавать сети, так как соединяет только 2 устройства (так называемое соединение “точка - точка”).

Сигналы интерфейса RS-485 передаются дифференциальными перепадами напряжения величиной (0,2...8) В, что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (и более с использованием специальных устройств – повторителей). Кроме того, интерфейс RS-485 позволяет создавать сети путем параллельного подключения многих устройств к одной физической линии (так называемая “мультиплексная шина”).
В обычном PC-совместимом персональном компьютере (не промышленного исполнения) этот интерфейс отсутствует, поэтому необходим специальный адаптер - преобразователь интерфейса RS-485/232.
Наша компания рекомендует использовать полностью автоматические преобразователи интерфейса, не требующие сигнала управления передатчиком. Такие преобразователи, как правило, бывают двух видов:- преобразователи, требующие жесткого указания скорости обмена и длины передаваемого слова (с учетом стартовых, стоповых бит и бита четности) для расчета времени окончания передачи: например, преобразователь ADAM-4520 производства компании Advantech. Все параметры задаются переключателями в самом преобразователе, причем для задания этих параметров корпус преобразователя необходимо разобрать;
- преобразователи на основе технологий “Self Tuner” и им подобных, не требующие никаких указаний вообще, и, соответственно, не имеющие никаких органов управления: например, преобразователь I-7520 производства компании ICP DAS. Данный преобразователь предпочтительнее для использования в сетях с приборами МЕТАКОН.
В автоматических преобразователях выходы интерфейса RS-485 обычно имеют маркировку “DATA+” и “DATA-“. В I-7520 и ADAM-4520 вывод “DATA+” функционально эквивалентен выводу “A” регулятора МЕТАКОН, вывод “DATA-“ - выводу “B”.
Устройства, подключаемые к интерфейсу RS-485, характеризуются важным параметром по входу приемопередатчика: “единица нагрузки” (“Unit Load” - UL). По стандарту в сети допускается использование до 32 единиц нагрузки, т.е. до 32 устройств, каждое из которых нагружает линию в 1 UL. В настоящее время существуют микросхемы приемопередатчиков с характеристикой менее 1 UL, например - 0,25 UL. В этом случае количество физи
чески подключенных к линии устройств можно увеличить, но суммарное количество UL в одной линии не должно превышать 32.
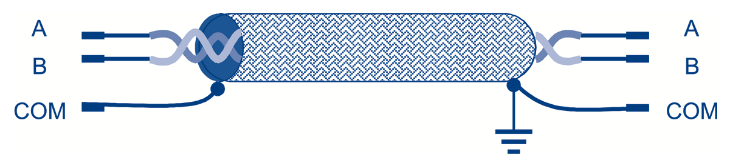
В качестве линии связи используется экранированная витая пара с волновым сопротивлением ≈120 Ом. Для защиты от помех экран (оплетка) витой пары заземляется в любой точке, но только один раз: это исключает протекание больших токов по экрану из-за неравенства потенциалов “земли”. Выбор точки, в которой следует заземлять кабель, не регламентируется стандартом, но, как правило, экран линии связи заземляют на одном из ее концов.
Устройства к сети RS-485 подключаются последовательно, с соблюдением полярности контактов A и B:
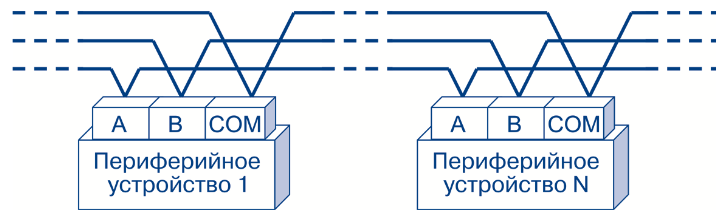
Как видно из рисунка, длинные ответвления (шлейфы) от магистрали до периферийных устройств не допускаются. Стандарт исходит из предположения, что длина шлейфа равна нулю, но на практике этого достичь невозможно (небольшой шлейф всегда имеется внутри любого периферийного устройства: от клеммы
до микросхемы приемопередатчика).
Качество витой пары оказывает большое влияние на дальность связи и максимальную скорость обмена в линии. Существуют специальные методики расчета допустимых скоростей обмена и максимальной длины линии связи, основанные на паспортных параметрах кабеля (волновое сопротивление, погонная емкость, активное сопротивление) и микросхем приемопередатчиков (допустимые искажения фронта сигнала). Но на относительно низких скоростях обмена (до 19200 бит/с) основное влияние на допустимую длину линии связи оказывает активное сопротивление кабеля. Опытным путем установлено, что на расстояниях до 600 м допускается использовать кабель с медной жилой сечением 0,35 мм (например, кабель КММ 2х0,35), на большие расстояния сечение кабеля необходимо пропорционально увеличить. Этот эмпирический результат хорошо согласуется с результатами, полученными расчетными методами.
Даже для скоростей обмена порядка 19200 бит/с кабель уже можно считать длинной линией, а любая длинная линия для исключения помех от отраженного сигнала должна быть согласована на концах. Для согласования используются резисторы
сопротивлением 120 Ом (точнее, с сопротивлением, равным волновому сопротивлению кабеля, но, как правило, используемые витые пары имеют волновое сопротивление около 120 Ом и точно подбирать резистор нет необходимости) и мощностью не менее 0,25 Вт – так называемый “терминатор”. Терминаторы устанавливаются на обоих концах линии связи, между контактами A и B витой пары.
В сетях RS-485 часто наблюдается состояние, когда все подключенные к сети устройства находятся в пассивном состоянии, т.е. в сети отсутствует передача и все приемопередатчики “слушают” сеть. В этом случае приемопередатчики не могут корректно распознать никакого устойчивого логического состояния в линии, а непосредственно после передачи все приемопередатчики распознают в линии состояние, соответствующее последнему переданному биту, что эквивалентно помехе в линии связи. На эту проблему не так часто обращают внимания, борясь с ее последствиями программными методами, но тем не менее решить ее аппаратно несложно. Достаточно с помощью специальных цепей смещения создать в линии потенциал, эквивалентный состоянию отсутствия передачи (так называемое состояние “MARK”: передатчик включен, но передача не ведется). Цепи смещения и терминатор реализованы в преобразователе I-7520. Для корректной работы цепей смещения необходимо наличие двух терминаторов в линии связи.
В сети RS-485 возможна конфликтная ситуация, когда 2 и более устройства начинают передачу одновременно. Это происходит в следующих случаях:
• в момент включения питания из-за переходных процессов устройства кратковременно могут находится в режиме передачи;
• одно или более из устройств неисправно;
• некорректно используется так называемый “мульти-мастерный” протокол, когда инициаторами обмена могут быть несколько устройств.
В первых двух случаях быстро устранить конфликт невозможно, что теоретически может привести к перегреву и выходу из строя приемопередатчиков RS-485. К счастью, такая ситуация предусмотрена стандартом и дополнительная защита приемопередатчика обычно не требуется. В последнем случае необходимо предусмотреть программное разделение канала между устройствами-инициаторами обмена, так как в любом случае для нормального функционирования линия связи может одновременно предоставляться только одному передатчику.
[ http://www.metodichka-contravt.ru/?id=3937]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > RS-485
См. также в других словарях:
время передачи одного бита — битовый интервал такт передачи — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы битовый интервалтакт передачи EN bit slot … Справочник технического переводчика
Список пропускных способностей интерфейсов передачи данных — В данном списке приведены пропускные способности различных интерфейсов передачи данных, применяемых в компьютерной технике. Для обозначения пропускной способности интерфейса иногда могут использоваться термины ёмкость канала или… … Википедия
CDMA — Стиль этой статьи неэнциклопедичен или нарушает нормы русского языка. Статью следует исправить согласно стилистическим правилам Википедии. CDMA (англ. Code Division Multiple Access множественный доступ с кодов … Википедия
DiSEqC — Переключатель DiSEqC 4×1 для подключения к ресиверу четырёх конверторов DiSEqC (Digital Satellite Equipment Control, традиционный вариант прочтения: Дай … Википедия
ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи — Терминология ГОСТ Р ИСО/МЭК 19762 4 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа: ALOHA [ALOHA slotted]:… … Словарь-справочник терминов нормативно-технической документации
Физическое кодирование — Эта статья или раздел нуждается в переработке. Пожалуйста, улучшите статью в соответствии с правилами написания статей … Википедия
протокол Modbus RTU — [Интент] 3.5.1. Протокол MODBUS Протокол Modbus был предложен в 1979 году компанией Modicon. Он должен был служить протоколом реализации внутренних коммуникаций «точка точка» между ПЛК Modicon и панелью программирования,… … Справочник технического переводчика
Диспетчерская централизация — техническое средство оперативного руководства движением поездов, позволяющее поездному диспетчеру с центрального поста управлять стрелочными переводами и сигналами всех контролируемых пунктов, входящих в диспетчерский круг. Наибольший эффект даёт … Википедия
Информационная — функция автоматизированной системы управления Функция АСУ, включающая получение информации, обработку и передачу информации персоналу АСУ или за пределы системы о состоянии ТОУ или внешней среды Источник … Словарь-справочник терминов нормативно-технической документации
информационная плотность сигнала — 06.01.52 информационная плотность сигнала [ bandwidth times time]: Ширина полосы частот и время, необходимые для передачи одного бита информации, определяющие ширину занимаемой полосы частот для данной скорости передачи данных. Источник … Словарь-справочник терминов нормативно-технической документации
BT — BT: Содержание 1 География 2 Техника 3 Другое 4 См. также … Википедия